PROJECTS
A Catalogue of My Robotics Projects






HOBBY BUILDS
Ardupilot
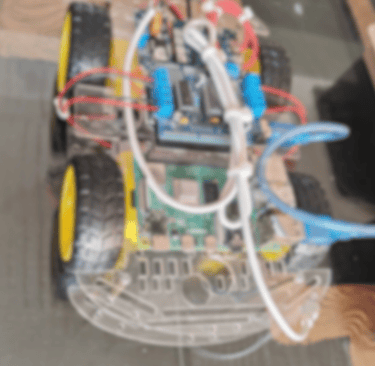
ROS TeleOp
Micro FPV
Click on the tiles to learn more.
MAVROS
INDIAN INSTITUTE OF SCIENCE, BANGALORE





Flight Controller
Augmentations
Drivers
Click on the tiles to learn more.
Department of Aerospace Engineering
ROBOMANIPAL




RoboCon 2021
Omni Rover
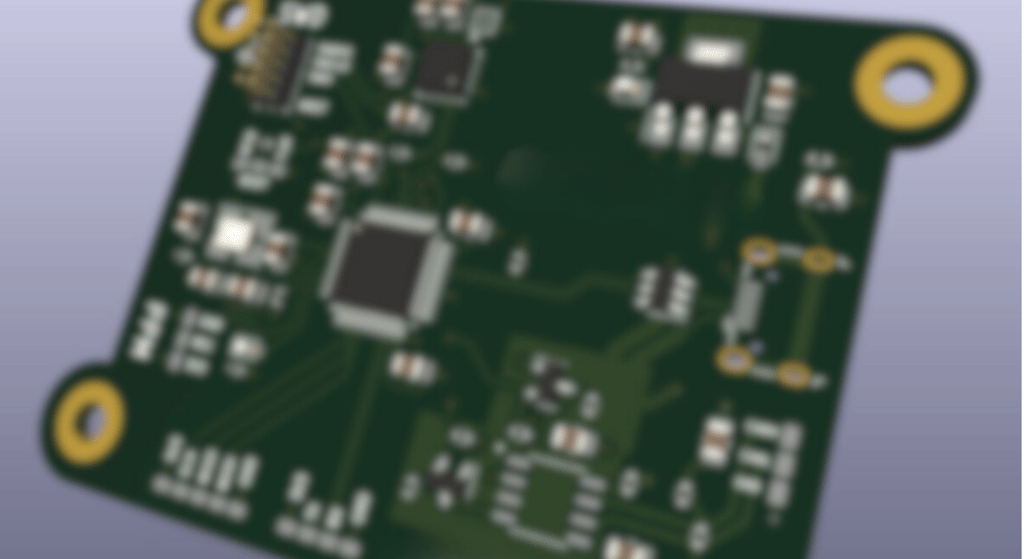
PCB Design Challenge
Click on the tiles to learn more.
RoboManipal Student Team
ALLSKIER SOLUTIONS
IoT Solutions
Edge Computing


Allskier Reel
IE MECHATRONICS


Servo Arm
IUGV
Click on the tiles to learn more.
NEXAMS INDIA PVT LTD




Built a miniature injection molding machine with a clamping force of 5 tons, designed for prototyping and testing experimental plastic granules with melting points up to 200 °C. The project combined mechanical design, high-power actuation, temperature regulation, and custom control software.
Key Features & Implementation:
Actuation & Mechanics:
Heavy-duty NEMA 34 stepper motors used to drive both the heating barrel extrusion screw and the injection/clamping plates.
Mechanical assembly designed for durability and repeatability under significant load.
Heating & Temperature Control:
Heating barrel designed to melt plastic granules efficiently up to 200 °C.
K-type thermocouples integrated into the barrel for real-time temperature measurement.
Relays for heating element switching.
Implemented PID control loops to maintain precise temperature setpoints.
Control System:
Raspberry Pi + Arduino combination:
Arduino for low-level motor actuation and relay switching.
Raspberry Pi running higher-level logic, UI, and setpoint management.
Developed a custom control interface using PySimpleGUI, enabling intuitive operation, parameter entry, and monitoring.
Safety & Stability:
Integrated software limits and emergency cutoffs.
Electrical and thermal safety considered in design of wiring, insulation, and load distribution.
Lessons Learned:
Gained deep understanding of thermomechanical control systems.
Learned how to combine high-torque stepper actuation with thermal processes.
Developed practical skills in temperature feedback loops, relay control, and motor synchronization.
Improved ability to design intuitive user interfaces for complex hardware systems.
Why This Project Matters:
This project bridged mechanical engineering, electronics, and control software, providing experience in building industry-relevant prototyping equipment. It highlighted challenges in precision thermal management, high-load actuation, and safe system integration.
I Wish I Could:
Integrate closed-loop force/pressure feedback sensors for injection control.
Add graphical process monitoring with live plots of temperature and actuation data.
Explore multi-material molding capabilities.
Upgrade heating and control systems for higher temperature polymers.
Automate cycle sequences to support repeatable, batch-mode prototyping.
E-YANTRA eYRC 2022-2023
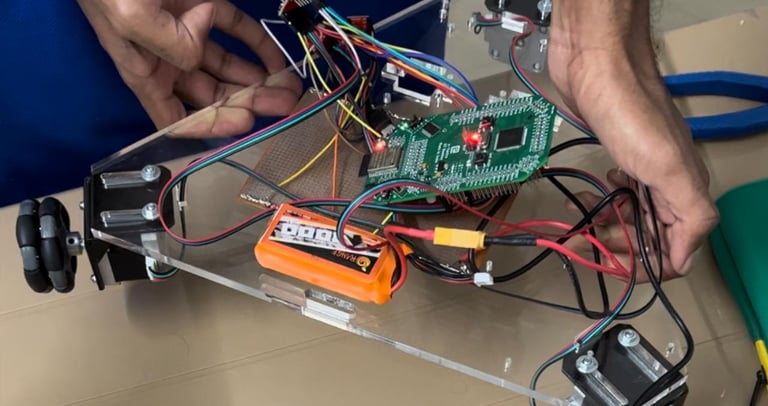
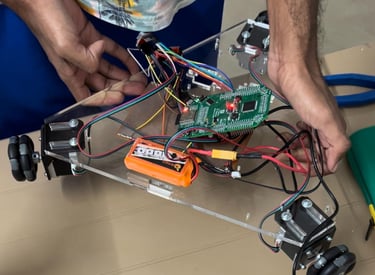

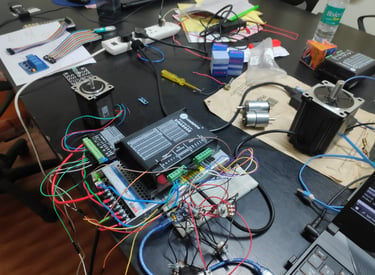
We built a triangular, three-wheeled holonomic robot capable of omnidirectional motion. The project was built around E-Yantra’s custom microcontroller platform, designed to tackle challenges involving precision motion control, kinematics, and vision-guided tasks.
Key Features & Implementation:
Mechanical & Motion Design:
Three omni-wheels arranged in a triangular configuration for holonomic drive.
Required implementing inverse kinematics equations to map desired velocities and trajectories into individual motor commands.
Electronics & Control:
E-Yantra custom microcontroller as the primary control board.
Integrated motor drivers to achieve smooth control across all three wheels.
Tasks Implemented:
Task 1 – Geometric Path Tracing:
Programmed the robot to trace basic geometric shapes (squares, circles).
Required precise velocity mapping and trajectory control.
Task 2 – Vision-Guided Calligraphy:
Used an overhead camera system with ArUco markers for localization.
Implemented trajectory planning to reproduce calligraphy patterns on a white sheet.
Combined real-time localization with closed-loop corrections for accuracy.
Collaborators: Arvind Kaushik, Rishabh Dugar, Jordan Kuruvilla
MISCELLANEOUS
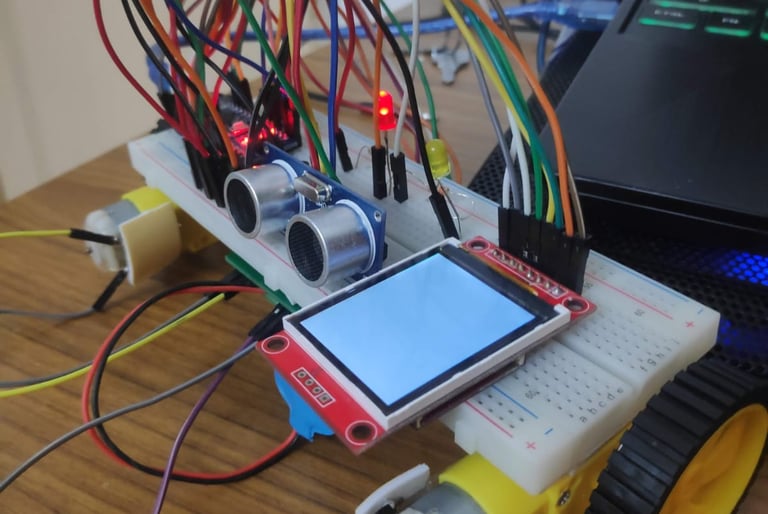
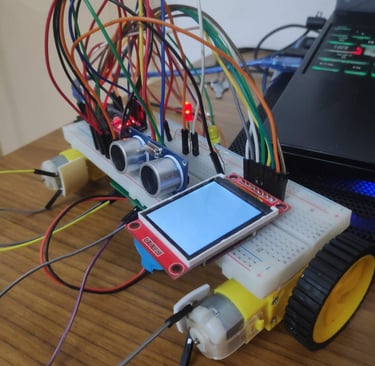
Stop & Go Bot with SR04 and OLED Screen
Built a simple obstacle-avoiding robot using an HC-SR04 ultrasonic sensor for distance measurement and an OLED screen for real-time feedback. Implemented a stop/go logic based on configurable distance thresholds.
Blynk/ESP32 Controlled Bot
Designed an IoT-enabled robot controlled through the Blynk mobile app using ESP32 Wi-Fi capabilities. Implemented cloud-based commands for direction and speed control, demonstrating integration of IoT frameworks into robotics.
Line Follower Simulation (ROS/Gazebo)
Modeled a differential-drive robot in Fusion 360 and simulated its line-following behavior using ROS1 and Gazebo. Implemented camera/sensor-based perception in simulation and tuned PID controllers for stable tracking.
Modified IKinBody in Modern Robotics Library
Extended the IKinBody() inverse kinematics function to report intermediate Newton-Raphson iterates, enabling visualization of convergence behavior. Applied the new method to a UR5 industrial manipulator and demonstrated convergence in CoppeliaSim.
UR5 Gravity-Driven Dynamics Simulation
Wrote a dynamics simulator function for the UR5 robot arm where all joints were torque-free and influenced only by gravity. Integrated motion using 100+ steps/sec, recorded joint angles into a .csv log, and animated results in CoppeliaSim for validation.
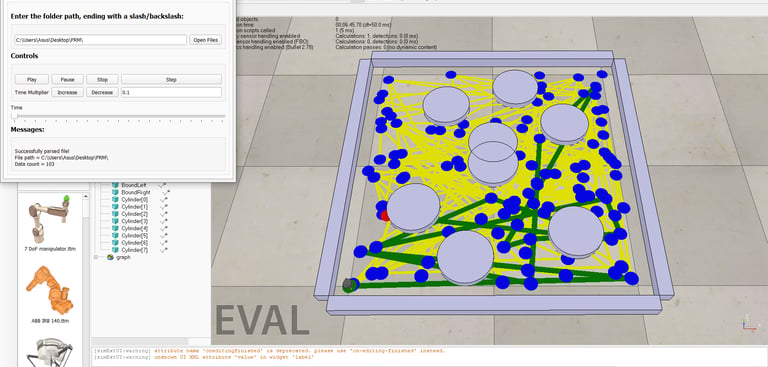
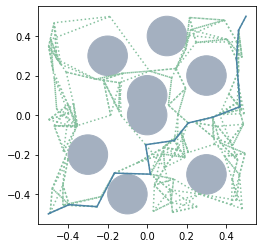
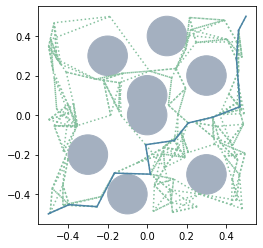
Sampling-Based Path Planning (RRT)
Implemented a Rapidly-exploring Random Tree (RRT) planner to find collision-free paths for a point robot navigating a cluttered 2D environment. Used CoppeliaSim for environment setup and Matplotlib for visualizing the generated path and tree expansion.
© 2025. All rights reserved.
All company logos, images, and trademarks are the property of their respective owners. Images sourced from public press releases are used here for informational and educational purposes only, with proper attribution. All other images, including photographs and project visuals, are original and owned by the site author. The inclusion of company images does not imply endorsement, sponsorship, or affiliation.