Experiments With Embedded Systems
1. Dummy UAV Swarm via ESPNOW
Built a mock swarm system where multiple UAV nodes communicated wirelessly using the ESPNOW protocol.
Implemented peer-to-peer message passing for position and state updates between drones.
Focused on low-latency communication, message reliability, and lightweight payload transmission.
Learned practical issues of collision-free wireless messaging and debugging ESP32-based networks.
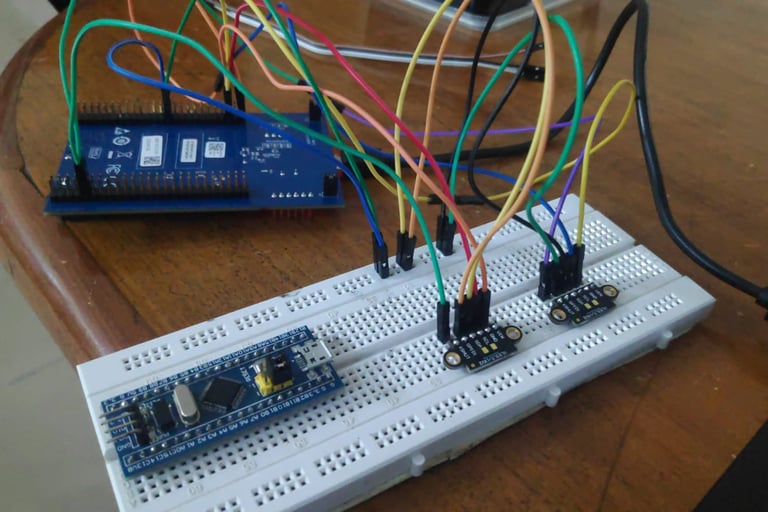
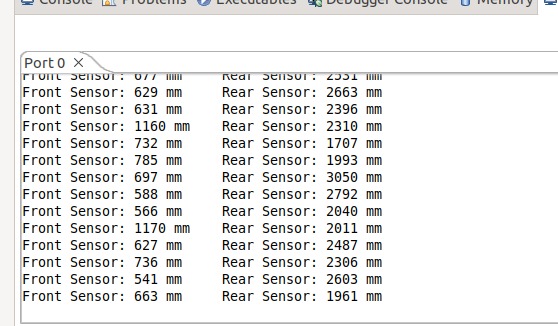
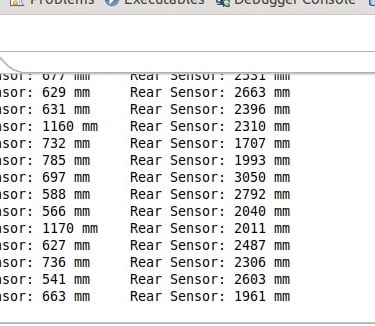
2. Dual STLidar I2C Integration
Integrated two STLidar sensors on a single I²C bus using an STM32F407 microcontroller.
Managed device addressing and bus timing to prevent collisions between simultaneous sensor queries.
Developed firmware to poll sensors alternately, process distance readings, and handle I²C bus errors gracefully.
Gained experience in sensor fusion preparation for autonomous navigation pipelines.
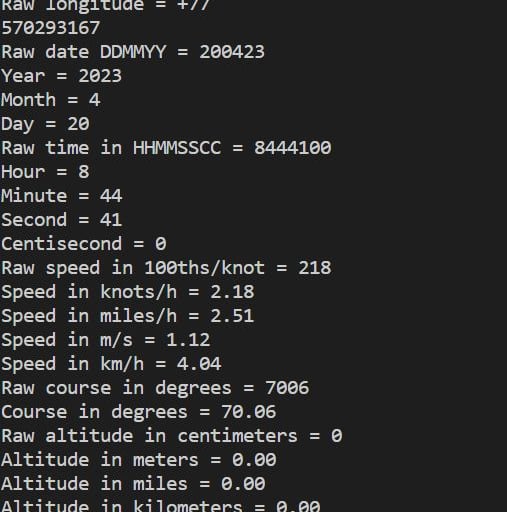
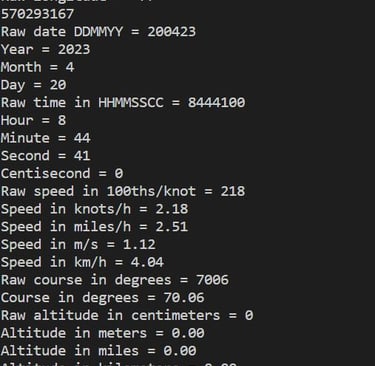
3. GPS Polling Loop
Implemented a GPS polling loop on STM32F407 for continuous position tracking.
Parsed NMEA sentences and converted latitude/longitude into usable coordinates for navigation tasks.
Designed the loop for non-blocking operation, integrating seamlessly with other MCU tasks (IMU reading, communication).
Highlighted the importance of real-time scheduling and handling intermittent GPS signal loss.
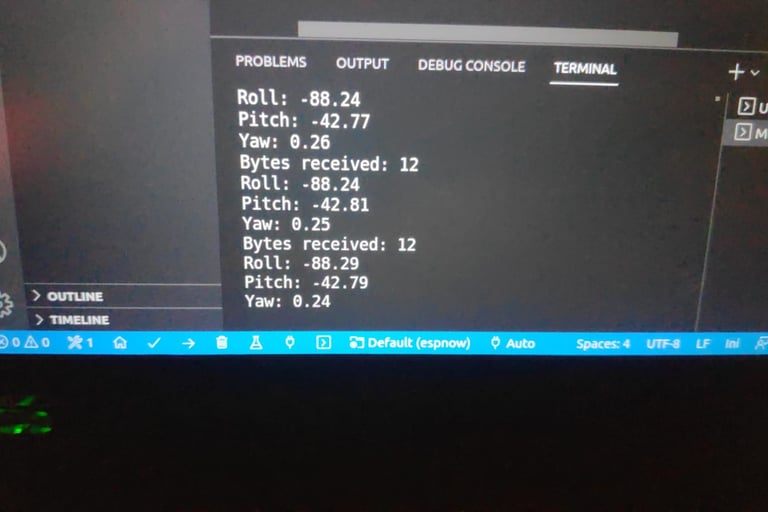
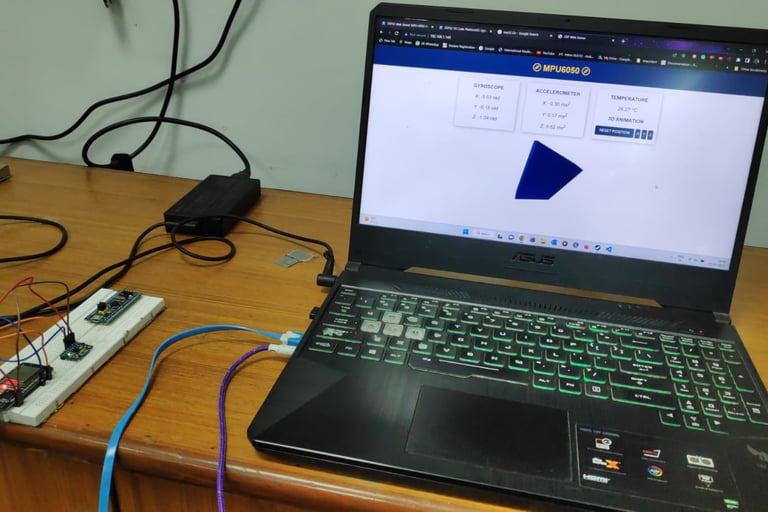
4. MPU6050 Orientation Test-Bench
Built a mockup 3D test bench simulating MPU6050 sensor orientation for controlled experiments.
Implemented a complementary filter to fuse accelerometer and gyroscope data for roll and pitch angle estimation.
Tested filter response to simulated rotations and biases, validating sensor fusion algorithms before UAV deployment.
Developed insights into noise handling, calibration, and real-time sensor processing.
Why These Experiments Matter:
These projects demonstrate low-level embedded programming, sensor integration, and autonomous system prototyping skills. They allowed me to explore communication protocols, sensor fusion, and real-time MCU operation without relying on fully built UAVs, emphasizing a code-first, systems-level approach.
I Wish I Could:
Extend ESPNOW swarm system to support multi-hop communication and collision avoidance.
Implement full sensor fusion combining GPS, IMU, and LiDAR for simulated navigation.
Upgrade test-bench to 6-DOF motion simulation, enabling more advanced attitude control experiments.
Integrate ROS nodes for visualization and logging of sensor data from STM32 experiments.
© 2025. All rights reserved.
All company logos, images, and trademarks are the property of their respective owners. Images sourced from public press releases are used here for informational and educational purposes only, with proper attribution. All other images, including photographs and project visuals, are original and owned by the site author. The inclusion of company images does not imply endorsement, sponsorship, or affiliation.