Intelligent Unmanned Ground Vehicle
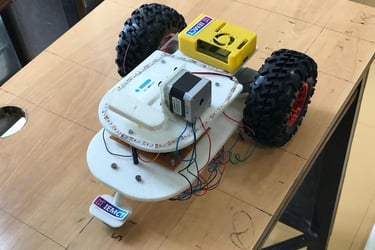
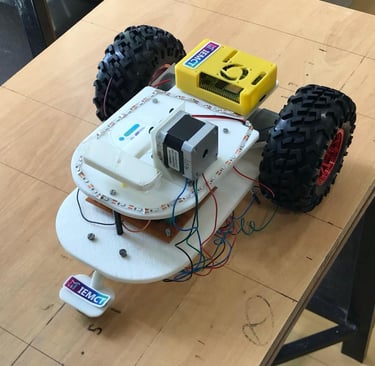



We built an autonomous ground robot designed to navigate indoor environments and survey building hallways and gauges. The platform combined onboard computation, depth sensing, and motor control for intelligent operation.
Key Features & Implementation:
Computation & Control:
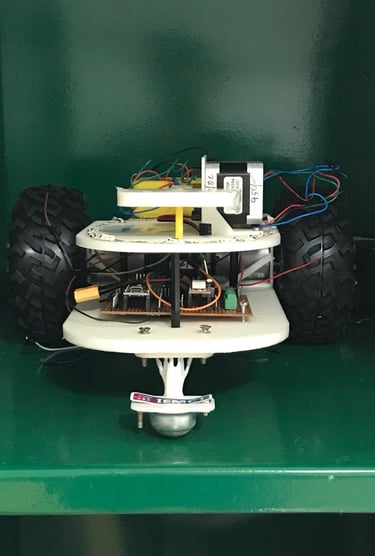
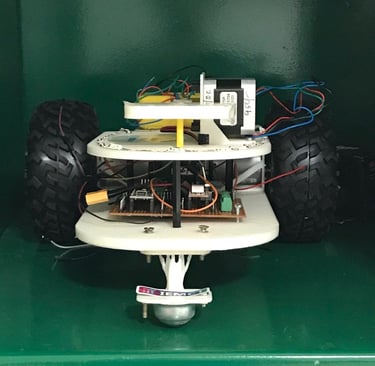
Raspberry Pi as the main processing unit running ROS for navigation and perception.
Arduino with L293D motor driver to control DC motors for differential drive locomotion.
Perception:
Intel RealSense camera for depth perception, environment mapping, and obstacle avoidance.
Stepper motor used to articulate the camera, enabling adjustable viewpoints for surveying.
Autonomy:
Implemented ROS-based navigation for hallway traversal and waypoint following.
Enabled automated survey of gauges and checkpoints using sensor input and camera feedback.
Power & Integration:
Single-board computation and sensor stack powered via battery with regulated distribution for Pi, Arduino, and sensors.
Lessons Learned:
Gained experience in multi-processor integration (Pi + Arduino) for robotics applications.
Learned how to combine vision-based perception with autonomous motion control.
Developed skills in ROS navigation, sensor articulation, and real-world indoor mapping.
Learned practical considerations for hardware integration, wiring, and battery management.
If Given the Chance, We Would Like To:
Add SLAM (Simultaneous Localization and Mapping) for more accurate mapping and navigation.
Integrate additional sensors (e.g., ultrasonic or LiDAR) for redundancy in obstacle detection.
Implement automated data logging and remote monitoring for survey tasks.
Explore vision-based anomaly detection on gauges or equipment for predictive maintenance.
Collaborator & Project Lead: Arvind Kaushik
© 2025. All rights reserved.
All company logos, images, and trademarks are the property of their respective owners. Images sourced from public press releases are used here for informational and educational purposes only, with proper attribution. All other images, including photographs and project visuals, are original and owned by the site author. The inclusion of company images does not imply endorsement, sponsorship, or affiliation.